Das TIGRE Teleskop
Zwischen-Tests

Menu:
Update:
16. Januar 2024
Teleskop-Zwischen-Tests in Hamburg
Aktueller Stand (1. 7. 2004):
Das Teleskop wurde planmäßig zur Endüberholung an die Fa. Halfmann Teleskoptechnik zurückgegeben.
Optik:
Die Spiegel wurden vom Hersteller interferometrisch vermessen.
RMS Sollwert, der nicht überschritten werden sollte, ist 0,1 lambda.
Zum Verständnis der Tabellen:
In der 1. Zeile ist die Summe aller Aberrationen gegeben, z.B RMS=0.032 lambda.
Wenn man davon den Anteil einer bestimmten Aberration abzieht (z.B. C33),
verbleibt eine Restsumme (hier RMS=0.026). Je stärker die Verringerung ausfällt,
desto höher ist der Anteil dieser Aberration am Gesamtfehler. Verändert sich die
Restsumme nicht, ist dieser Abbildungsfehler nicht (messbar) vorhanden.
Laut Prüfprotokollen ergeben sich folgende Wellenfrontaberrationen:
Hauptspiegel (M1)
| RMS | P-V | Kommentar | ||
|---|---|---|---|---|
| insgesamt | 0.032 | 0.226 | mit 633nm zu multiplizieren | |
| minus | restliche Aberration | |||
| R | 0.032 | 0.226 | Defokus | |
| A | 0.032 | 0.226 | Astigmatismus | |
| C | 0.032 | 0.226 | Koma | |
| C33 | 0.026 | 0.154 | Dreieckskoma | |
| A4 | 0.032 | 0.226 | quadr. Astigmatismus | |
| S3 | 0.032 | 0.226 | sphär. Aberration 3. Ordnung | |
| M | 0.025 | 0.160 | Zonenfehler |
Die Wellenfrontaberrationen sind im wesentlichen durch Dreieckskoma bestimmt.
Mit 0.032 lambda insgesamt ist der Sollwert deutlich unterschritten.
Sekundärspiegel (M2)
| RMS | P-V | Kommentar | ||
|---|---|---|---|---|
| insgesamt | 0.035 | 0.267 | mit 633nm zu multiplizieren | |
| minus | restliche Aberration | |||
| R | 0.035 | 0.267 | Defokus | |
| A | 0.028 | 0.234 | Astigmatismus | |
| C | 0.035 | 0.267 | Koma | |
| C33 | 0.031 | 0.234 | Dreieckskoma | |
| A4 | 0.035 | 0.268 | quadr. Astigmatismus | |
| S3 | 0.035 | 0.267 | sphär. Aberration 3. Ordnung | |
| M | 0.021 | 0.247 | Zonenfehler |
Mit 0.035 lambda insgesamt ist der RMS Sollwert jedoch deutlich unterschritten.
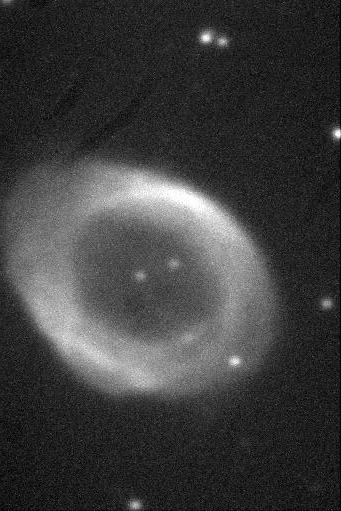 Bild: ST7-Aufnahme des Ringnebels in der Leier (M57). Belichtung 2min.
Bild: ST7-Aufnahme des Ringnebels in der Leier (M57). Belichtung 2min.
Optikjustage:
Zur Demonstration der Teleskopoptik wurden intra- und extrafokale Sternbilder (2min Belichtungen)
aufgenommen (siehe R.N. Wilson, Reflecting Telescope Otics II, S. 135)
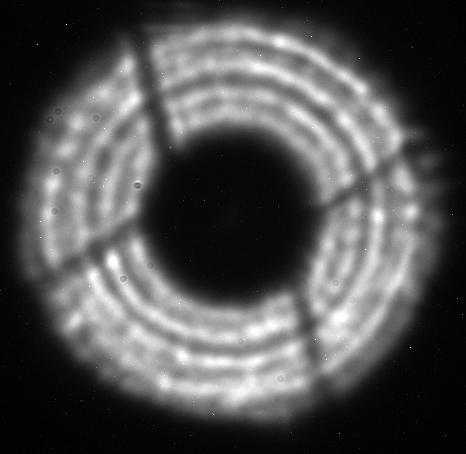 intrafokal
intrafokal
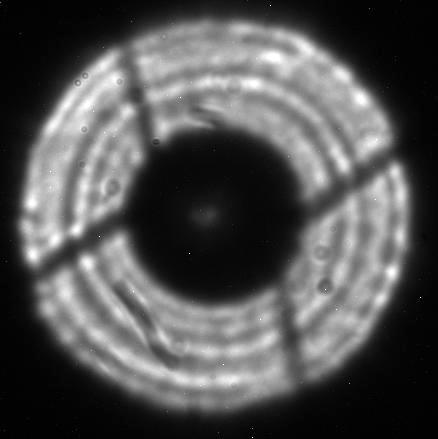 extrafokal
extrafokal
Der dunkle Streifen links unten im extrafokalen Bild sowie gewisse kleinskalige Strukturen sind
im wahrsten Sinne des Wortes Dreckeffekte. Die scheinbare Ovalität der Bilder ist ein Bildschirmeffekt.
Tatsächlich sind die Bilder kreisrund (bei Astigmatismus wären die Ellipsen auch gegeneinander um 90 Grad
verdreht). Gut erkennbar sind dagegen Zonenfehler. Die Frage ist, inwieweit diese sich auf die
Abbildungsgüte auswirken. Entscheidend ist die Spotkonzentration.
Die Fa. Zeiss gibt dazu eine Faustformel für eine Obergrenze an, die die Anzahl der Zonen (4),
die Spiegelgrösse (1200 mm Durchmesser) sowie die RMS von M1 und M2 (in der Summe 27,6 nm)
einschliesst:
Danach wären 80% des Lichtes in max. 0,35 arcsec konzentriert.
Eine exakte Bestimmung kann jedoch nur mit Hilfe quantitativer Methoden, wie z.B.einem Shack-Hartmann-Test, erfolgen. Dies ist auch geplant.
Pointingverhalten des Teleskopes
In die HRT Teleskop-Software (TCS) sind selbstverständlich alle vorausrechenbaren Effekte,
wie z.B. die Refraktion des Sternlichtes in der Erdatmosphäre, die die scheinbare Position
in Azimut A und Höhe H bestimmen, eingerechnet. Diese Position sei die Sollposition.
Es bleiben jedoch nicht vorhersagbare Abweichungen
der Ist- von der Soll-Position, die durch Eigenschaften des Teleskopes und seiner Aufstellung
bestimmt sind. Dabei handelt es sich um folgende Größen:
an: nördliche Abweichung der Azimutachse vom Zenit (Aufstellungsfehler)
ae: östliche Abweichung der Azimutachse vom Zenit (Aufstellungsfehler)
npae: Abweichung von 90 Grad des Winkels zwischen Azimut- und Elevationsachse (Fertigungsfehler)
bnp: Winkel zwischen optischer Achse und Teleskopachse (Justagefehler)
aoff: Abweichung der Nullmarke des Azimutencoders vom Azimut Null (für HRT ist dies Süden)
eoff: Abweichung der Nullmarke des Höhenencoders vom Horizont
aes: Zentrierfehler Azimutencoder (Sinus-Anteil)
aec: Zentrierfehler Azimutencoder (Cosinus-Anteil)
ees: Zentrierfehler Höhenencoder (Sinus-Anteil) plus evtl. Tubusdurchbiegung (bei Abweichung vom reinen Cosinus)
eec: Zentrierfehler Höhenencoder (Cosinus-Anteil) plus Tubusdurchbiegung
c1-c4: HRT-spezifische Oberwellen in Höhe, in Abhängigkeit vom Azimut
c5: HRT-spezifisch
Die ersten zehn Parameter beschreiben das quasi ideale Teleskop. Das reale Teleskop kann davon abweichen
(z.B. würden Lagerungenauigkeiten eine Welligkeit erzeugen, die zusätzliche Parameter erfordern
würden). Wir beschreiben aktuell das Pontingverhalten mit den Gleichungen des idealen Telskopes
plus fünf zusätzlichen Parametern (c1 bis c5):
dE=eoff+an*cos(a)+ae*sin(a)+ees*sin(e)+eec*cos(e)+c5/cos(e)+c1*sin(2*a)+c2*cos(2*a)
+c3*sin(3*a)+c4*cos(3*a)
dA=aoff+an*sin(a)*tan(e)-ae*cos(a)*tan(e)+npae*tan(e)-bnp/cos(e)+aes*sin(a)+aec*cos(a)
Zur Ermittlung des Pointingmodelles wurden die Istpositionen von 126 Sternen vermessen und mit den
Sollpositionen (Katalogwerte) verglichen. Aus den Differenzen dE und dA wurden die Parameter des Pointingmodelles
ermittelt und das Modell in die Teleskopsteuerung eingestellt. Mit diesem Pointingmodell ergeben sich
Restdifferenzen von RMS=2" in Höhe und 5" in Azimut. Diese Messungen wurden bei Vorhandensein einer Hysteresis
getätigt. Nach Beseitigung dieser Hysteresis verkleinerten sich die dA entsprechend. Aus Zeitgründen wurde
jedoch auf die Erstellung eines neuen,so dichten, Pointingmodells wie hier dargestellt, verzichtet.